|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
无线电电子与电气工程百科全书 电动自行车行车电脑。 无线电电子电气工程百科全书
欢迎读者使用专为电动自行车设计的带有外部电流传感器的 PIC16F876A 微控制器上的行车电脑。 在其显示屏上,它显示运动参数和电池电压、消耗的电流、功率和电量消耗。 该设备采用可触及的元件底座制成,易于重复。 为了控制电动自行车的操作模式,使用了各种测量仪器。 电气参数由功率分析仪测量 [1, 2],运动参数由各种电子自行车计算机 [3] 甚至机械速度计 [4] 控制。 甚至还有电动自行车专用显示器[5],显示所有必要的参数,但成本很高。 基于此,我在带有外部电流传感器的PIC16F876A微控制器上开发了一款电动自行车行车电脑。 主要技术特点
括号内表示相应参数显示的离散性。 行车电脑以 1 分钟的分辨率显示当前时间。 行车电脑原理图如图1所示。 2. DD16 微控制器 (PIC876F2A-I/P) 由频率为 8 MHz 的 ZQ1 石英谐振器稳定的振荡器供电。 XP2 连接器用于对微控制器进行编程。 我将 PICkit6 编程器连接到它。 微控制器程序是在 Flowcode 图形环境中开发的 [XNUMX]。
使用微控制器的内部 10 位 ADC 进行电压和电流测量。 测量电压时,来自分压器 R5R9R12 的信号被馈送到微控制器的模拟输入 AN0 (RA0)。 测量电流时,电流传感器 R 两端的电压降ш 放大运算放大器OPA241(DA1)。 放大后的信号从运算放大器的输出到达微控制器的模拟输入 AN1 (RA1)。 增益由 Oy 反馈电路中的微调电阻 R13 设置。几乎可以使用 SO-241 封装中的任何单轨到轨运算放大器(例如 OPA8 或 TS340)来代替 OPA507。 该程序根据电流和电压的测量值计算功率和用电量。 使用标准测量分流器 75SHISV.2-0.5-15,在 75 A 电流下电压降为 15 mV,用作远程电流传感器。任何电阻为 5 ... 10 mΩ 的标准分流器或类似的自制作一个可以用作替代品[7]。 行车电脑由稳压晶体管VT1和TL431ID(DA2)微电路组成的线性稳压器供电。 电源电路中安装了VD1R10C6C7电路,可降低电动机运行时产生的噪音。 电阻器 R16 和 R17 确保电容器 C6 和 C7 之间的电压分布均匀。 最大允许输入电压(电池电压)取决于晶体管VT1允许的集电极-发射极电压、允许的功耗、散热器的质量以及电阻R19-R22释放的功率。 使用图中所示的稳定器元件时,电池电压不应超过 75 V。但是,设备能够在指示器上显示高达 102,3 V 的值。 行车电脑由 1,5 毫米厚的玻璃纤维制成的单面印刷电路板制成。 电路板的印刷导体图及其上元件的排列如图 2 所示。 3和图。 4.如图。 图XNUMX表示其外观。
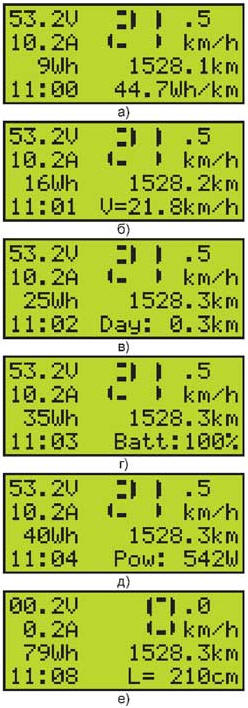
电路板正面有PIC16F876A微控制器、ZQ2石英谐振器、DS1307实时时钟芯片、微调电阻、VT1晶体管、XP1连接器(PLS-5R角引脚块)和PLS-14块连接HG1指示器已安装。 连接器的配合部分焊接到 HG1 指示器(母 PBS-14 块)的安装孔中。 BH-1 支架中安装有 2032V G3 CR642 锂电池。 所有其他元件均安装在印刷导体的一侧。 将圆柱形石英谐振器 ZQ1 (32768 Hz) 焊接到 DD1 芯片引脚 2 和 1 旁边的印刷导体一侧的孔中。 其主体的上部焊接到连接公共电线的箔片部分。 行车电脑板使用 M10 螺钉固定在两个 12 ... 3 mm 高的金属架上的 LCD 板上。 使用尺寸为 120b 的表面安装电阻器和电容器。 电容器C6和C7为E型封装的表面贴装氧化钽电容器,可用其他同尺寸电容器替换,容量为6,8... 稳压器中的npn晶体管BD139可以用TO-126封装中允许集电极-发射极电压大于80V的另一个相同结构的晶体管代替,例如BD179、MJE182 2N5192、BF469、KT817G。 在晶体管外壳下方放置一条面积约为 6 厘米的薄铜或铝片。2用作散热器。 晶体管通过带有螺母的 M3 螺钉固定到电路板上。 减少测量误差分流 Rш应尽可能靠近电池的负极端子。 与行车计算机的所有连接都可以用小电线进行。 用于连接行车电脑簧片开关SF1(路径传感器),分流器Rш,使用GB1电池,图中未示出的PC7TV连接器,安装在行车电脑机箱上。 簧片开关取自故障的电子自行车码表。 行车电脑中的参数指示显示在四行 LCD WH1604A 上,电源电压为 5 V,无背光。 其缺失的原因是背光消耗的电流较高(220 mA),这会导致 VT1 晶体管过热。 行车电脑开机后,液晶屏同时显示电压、电流、电量、当前时间、速度、总里程、电能消耗等七个参数(见图4)。 速度值使用伪图形显示在屏幕上。 这使得数字的高度可以达到两行,这极大地促进了从屏幕上读取速度。 行车电脑通过按钮 SB1“M”(设置分钟)、SB2“H”(设置小时)和 SB3“P”(指示模式)进行控制。 连续按下屏幕右下角的SB3按钮,代替电能的单位成本(图5,a),平均速度(图5,b),每日行驶里程(图5,c) )、电池电量(图 5,d)或电动机消耗的功率(图 5,e)。
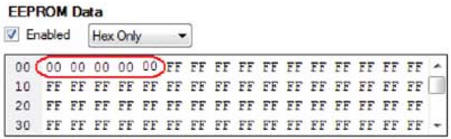
当按下SB3按钮超过5秒时,程序进入轮周设置模式(图5,f)。 继续按住此按钮,车轮的周长会以 1 厘米为步长从 201 厘米变为 215 厘米(26 英寸车轮)。 首次开机时,轮周设置为210cm,松开SB5按钮3秒后,退出轮周设置模式,并将设置值写入单片机的EEPROM中。 对微控制器进行编程时,需要将零写入前五个 EEPROM 单元(图 6),以将行进距离的初始值设置为零。 如果不这样做,里程将为 1525,7 公里。
程序在电动自行车停止后3秒将行驶的距离保存在单片机的EEPROM中。 为了指示录制时刻,LCD 右上角会出现一个星号符号 0,3 秒。 当电源关闭时,程序会重置电能的单位成本、平均速度和每日里程的值。 要设置设备,您可以使用输出电压为 25 ... 50 V 且允许负载电流至少为 5 A 的实验室电源来代替电池。作为等效负载,您可以使用强大的电源电阻为 5 ... 10 欧姆的线电阻。 按以下顺序设置设备。 首先校准其电压表。 为此,需要通过电池或实验室电源向设备施加电压,并使用精确的数字电压表对其进行控制。 通过改变调谐电阻器R9的电阻,可以实现示例性电压表和被调节装置的相同读数。 然后对电流表进行校准。 精确的数字电流表与负载串联。 通过施加电源电压,通过改变调谐电阻器R13的电阻,可以实现示例性电流表和被调节装置的相同读数。 如有必要,通过选择电阻器 R25,可以设置指示器上的最佳图像对比度。 行车电脑可以安装在任何合适的塑料或金属外壳中。 Sprint Layout 5.0 格式的行车电脑电路板文件和微控制器程序:ftp://ftp.radio.ru/pub/2016/05/tripcomp.zip。 文学
作者:A. Nefediev
交通噪音会延迟雏鸡的生长
06.05.2024 无线音箱三星音乐框 HW-LS60D
06.05.2024 控制和操纵光信号的新方法
05.05.2024
▪ 腾龙 16-300mm F/3.5-6.3 Di II VC PZD 微距镜头(型号 B016) ▪ 自学习电网
www.diagram.com.ua |




 留下您对本文的评论:
留下您对本文的评论: