|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
无线电电子与电气工程百科全书 具有过载保护的晶体管稳压器
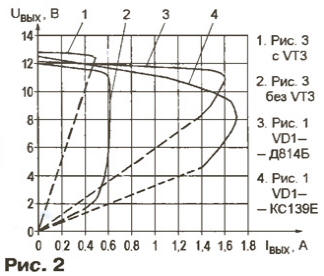
似乎关于连续稳压器的一切都已经写过了。 然而,开发一种可靠且不太复杂(不超过三个或四个晶体管)的稳定器,尤其是在负载电流增加的情况下,是一项相当艰巨的任务,因为首要任务之一就是要求可靠地保护控制晶体管免受过载。 同时,希望在消除过载原因后,能够自动恢复稳定器的正常工作。 满足这些要求的愿望通常会导致稳定器电路的显着复杂化以及其效率的显着降低。 所提议文章的作者正在尝试找到他认为的最佳解决方案。 在寻找最优方案之前,我们先来分析一下按照最常见的方案制作的稳压器的负载特性Uout = f(Iout)。 对于[1]中描述的稳定器,当过载时,输出电压Uout迅速降至零。 然而,电流不会减少,足以损坏负载,并且控制晶体管消耗的功率有时会超过允许的功率。 在[2]中,这种稳定器补充了触发保护。 过载时,不仅输出电压下降,电流也下降。 然而,这种保护还不够有效,因为它只有在输出电压降至 1V 以下后才会起作用,并且在某些条件下并不能消除调节晶体管的热过载。 为了使这种稳定器返回到操作模式,需要几乎完全关闭负载,而这并不总是可以接受的,特别是对于用作更复杂设备的组成部分的稳定器。 稳定器的保护,其示意图如图1所示。 由于过载导致输出电压略有下降,12 已被触发。 电路元件的额定值针对 1 V 输出电压给出,有两种版本:如果 VD814 是 D139B,则不带括号;如果是 KS3E,则带括号。 这种稳定器的操作的简要描述可以在[XNUMX]中找到。
其良好的参数是因为所有必要的信号都是由稳定的输出电压产生的,并且两个晶体管(调节VT1和控制VT2)都工作在电压放大模式。 该稳定器的实验负载特性如图 2 所示。 3(曲线4和XNUMX)。
当输出电压偏离标称值时,其增量几乎完全通过稳压二极管VD1传输到晶体管VT2的发射极。 如果不考虑齐纳二极管的微分电阻,则为ΔUe - ΔUout。 这是一个负反馈信号。 但该设备也有积极的一面。 它由输出电压增量的一部分创建,通过分压器 R2R3 提供给晶体管的基极:
稳定模式下总反馈为负,误差信号为该值
与R3相比,R2的绝对值越大,RXNUMX越小。 减小该比率有利于稳定器的稳定系数和输出电阻。 鉴于
齐纳二极管 VD1 应选择尽可能大但稳定的输出电压。 如果我们用两个正向串联的二极管代替电阻器 R3(例如,如[4]中所建议的),稳定器参数将会改善,因为 R3 在 ΔUb 和 ΔUbe 表达式中的位置将被开路二极管的小微分电阻所取代。 然而,当稳定器进入保护模式时,这种替换会导致一些问题。 我们将在下面详细讨论它们,但现在我们将电阻器 R3 保留在同一位置。 在稳定模式下,电阻器R1两端的压降几乎保持不变。 流过该电阻的电流是稳压二极管VD1的电流和晶体管VT2的发射极电流之和,实际上等于晶体管VT1的基极电流。 随着负载电阻的减小,流过R1的电流的最后一个分量增加,而第一个分量(齐纳二极管电流)减小到零,之后输出电压增量不再通过齐纳二极管传送到晶体管VT2的发射极。 结果,负反馈电路被破坏,而继续工作的正反馈导致两个晶体管雪崩关闭并切断负载电流。 负载电流,当超过时,保护被激活,可以通过以下公式估算
其中h21e是晶体管VT1的电流传输系数。 不幸的是,h21e 在晶体管的不同实例之间存在很大差异,具体取决于电流和温度。 因此,设置时常常要选择电阻R1。 在为大负载电流设计的稳定器中,电阻器R1的阻值较小。 结果,随着负载电流的减小,通过齐纳二极管VD1的电流增加得如此之多,以至于需要使用大功率齐纳二极管。 负载特性(参见图 3 中的曲线 4 和 2)中存在工作模式和保护模式之间相对较长的过渡部分(请注意,就晶体管 VT1 的热状态而言,这些部分是最困难的),这主要是由于开关过程的发展受到电阻器 R1 的局部负 OS 的阻碍。 电压越低 在其他条件不变的情况下,电阻器R1的值越大,齐纳二极管VD1的稳定性越好,并且稳定器从工作模式到保护模式的过渡越“紧”。 如前所述,使用具有最高稳定电压的齐纳二极管VD1的可行性的结论已通过实验得到证实。 稳压器的输出电压如图所示电路。 1、使用D814B齐纳二极管(Ust = 9 V),与类似的KS139E齐纳二极管(UCT = 3,9 V)相比,它对负载的依赖性要小得多,并且在过载时更“冷静”地切换到保护模式。 通过增加一个额外的晶体管VT3,可以减少甚至完全消除稳定器负载特性的过渡段,如图3所示。 XNUMX.
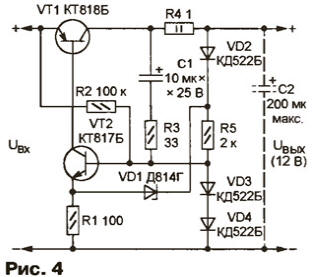
在工作模式下,该晶体管处于饱和状态,实际上对稳定器的工作没有影响,只是稍微恶化了输出电压的温度稳定性。 当过载导致稳压二极管VD1的电流趋于零时,三极管VT3进入导通状态,然后截止,为保护的快速开启创造条件。 这种情况下的负载特性不存在平滑过渡段(见图1中的曲线2)。 工作状态下二极管VD2、VD3在晶体管VT2的基础上进行稳压,提高了稳压器的主要参数。 然而,如果没有额外的晶体管 VT3,这会对保护产生负面影响,因为它削弱了操作系统的积极成分。 在这种情况下,切换到保护模式会非常延迟,并且仅在负载电压下降到接近基于晶体管 VT2 的二极管 VD3 和 VD2 支持的值之后才会发生(参见图 2 中的曲线 2)。 所考虑的稳定器有一个对许多应用来说很重要的缺点:在消除过载原因后,它们仍处于保护状态,并且通常,即使在连接负载的情况下施加电源电压,它们也不会进入工作模式。 有多种方法可以启动它们,例如,使用与晶体管 VT1 的集电极-发射极部分并联安装的附加电阻,或者(如[4]中提出的)“馈送”晶体管 VT2 的基极。 该问题是通过负载启动的可靠性和短路电流的大小之间的折衷来解决的,但这并不总是可以接受的。 [5]和[6]中考虑的发射单元的变体效率更高,但使整个稳定器变得复杂。 [7] 中提出了一种不常见但有趣的方法来使稳定器脱离保护模式。 其原理在于,专门配备的脉冲发生器周期性地强制打开调节晶体管,使稳定器转入工作模式一段时间。 如果过载原因消除,则在下一个脉冲结束时,保护将不再起作用,稳定器将继续正常运行。 过载期间控制晶体管中消耗的平均功率略有增加。 上图。 图4显示了根据该原理操作的稳定器的可能选项之一的图表。 它与[7]中描述的不同之处在于没有单独的节点——脉冲发生器。 过载时,稳定器由于正 OS 进入振荡模式,该正 OS 通过电容器 C1 关闭。 电阻R3限制电容器的充电电流,R4在外部负载闭合时充当发电机负载。
在没有过载的情况下,在施加电源电压后,稳定器通过电阻器 R2 启动。 由于电容器 C1 被开路二极管 VD2 和串联连接的电阻器 R3-R5 并联,因此不满足自激条件,并且该器件的工作原理与之前考虑的类似(见图 1)。 在稳定器过渡到保护模式期间,电容器C1充当升压器,加速该过程的发展。 保护模式下的稳压器等效电路如图 5 所示。 XNUMX.
当负载电阻Rn等于1时,电容器C4的正极端子通过电阻器R2连接到公共线(减去输入电压源)。 即使在稳定模式下,电容器所充电的电压也以负极性施加到晶体管VT1的基极并保持晶体管闭合。 电容器通过电流 i3 放电。 电流流过电阻器R5-R2和开路二极管VD1。 当VT0,7基极电压超过-2V时,VD2二极管截止,但电阻R2上流过电流i2,电容器继续充电。 当晶体管 VT1 的基极达到一个小的正电压时,后者以及 VT1 将开始打开。 由于通过电容器 C3 的正反馈,两个晶体管将完全打开并保持这种状态一段时间,直到电容器被电流 i5 充电到几乎电压 Uin,之后晶体管将关闭并重复该循环。 随图所示100种面值的元件,产生脉冲的持续时间以毫秒为单位,重复周期为200 ... 30 ms。 保护模式下输出电流脉冲的幅值约等于保护动作电流。 用指针毫安表测量短路电流的平均值约为XNUMXmA。 随着负载电阻 RH 的增加,当晶体管 VT1 和 VT2 开路时,负 OS“超过”正 OS,发电机再次变成稳压器。 状态发生变化时的 RH 值主要取决于电阻器 R3 的阻值。 如果其值太小(小于5欧姆),负载特性会出现迟滞,并且在R3为零电阻时,只有当负载电阻大于200欧姆时才恢复稳压。 电阻R3的阻值增大过多会导致负载特性出现过渡段。 基于晶体管VT2的负极性脉冲幅度达到10V,这会导致该晶体管的基极-发射极部分电击穿。 但击穿是可逆的,其电流受到电阻R1和R3的限制。 它不会干扰发电机的运行。 选择晶体管VT2时,还必须考虑到施加到其集电极-基极部分的电压达到稳压器输入和输出电压之和。 在运行设备中,稳压器输出通常由电容器(C2,如图 4 中的虚线所示)并联。 其电容不应超过200微法。 该限制是由于在没有完全关闭输出的过载期间,该电容器进入发电机的正反馈电路。 实际上,这表现为发电机仅在显着过载的情况下“启动”,并且负载特性中出现滞后。 电阻器R4的阻值必须使得脉冲期间其两端的压降足以打开晶体管VT2(-1V)并确保零负载电阻下自发电的条件。 不幸的是,在稳定模式下,该电阻器只会降低器件的效率。 为了使保护装置准确运行,在任何允许的负载电流下,稳定器的最小(考虑纹波)输入电压必须保持足以正常运行。 在检查上述所有额定输出电压为 12 V 的稳定器时,输出端带有 14 微法电容器的 10000 V 桥式二极管整流器作为电源。 用 VZ 38 毫伏表测量整流器输出端的纹波电压不超过 0,6 V。 如有必要,保护的脉冲性质可用于指示稳定器的状态,包括声音。 在后一种情况下,在过载期间,将会听到具有脉冲重复率的喀哒声。 上图。 图 6 显示了具有脉冲保护功能的更复杂稳定器的示意图,基本上没有本文第一部分中讨论的缺点(参见图 4)。 其输出电压为12V,输出电阻为0,08Ohm,稳定系数为250,最大工作电流为3A,保护阈值为3,2A,保护模式下的平均负载电流为60mA。 VT2 晶体管上的放大器的存在允许在必要时通过用更强大的复合晶体管替换 VT1 晶体管来显着增加工作电流。
该稳定器的保护算法与前面描述的保护算法几乎没有什么不同。 在保护模式下,晶体管VT2和VT3与频率设定电容器C1组成脉冲发生器。 电容器C2抑制高频寄生的产生。 稳定器输出电路中没有串联降低效率的电阻(与R4类似,见图4),发电机负载为电阻R1。 二极管VD1、VD2和晶体管VT4的作用与根据图2所示电路的稳定器中的元件VD3、VD3和VT3类似。 XNUMX. 限流电阻R4的阻值可以在几十欧姆到51kOhm的范围内。 稳定器的输出可以用最大 1000 μF 的电容器进行分流,但这会导致负载特性出现迟滞:在 3,2 A 的保护阈值下,稳定模式返回电流的测量值为 1,9 A。 为了清楚地切换模式,需要随着负载电阻的减小,在晶体管VT3进入饱和之前流过齐纳二极管VD2的电流停止。因此,选择电阻器R1的值,使得在保护跳闸之前,该晶体管的集电极和发射极之间保持至少2…3V的电压。 应该记住,随着电阻 R2 的显着减小,晶体管 VT1.2 上消耗的功率显着增加。 理论上,电容器C1的存在会导致稳定器的输出电压纹波增加。 然而,这在实践中并未被观察到。 输出稳定电压等于二极管VD1和VD2、VT4晶体管的基极-发射极部分和VD3齐纳二极管的稳定电压的总和减去VT3晶体管的基极-发射极部分的电压降——比齐纳二极管的稳定电压大约高1,4V。 保护跳闸电流按下式计算
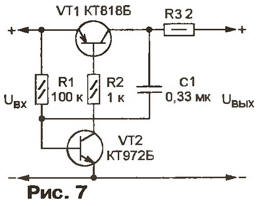
由于晶体管 VT2 上有一个额外的放大器,即使额定负载电流很大,流过电阻器 R3 的电流也相对较小。 一方面,这提高了稳定器的效率,但另一方面,它迫使使用能够在低电流下工作的齐纳二极管作为VD3。 KS6Zh 齐纳二极管的最小稳定电流如图(见图 211)所示为 0,5 mA。 这种稳定器除了其直接目的外,还可以用作电池放电限制器。 为此,需要设置输出电压,以便当电池电压低于允许电压时,保护功能将起作用,防止进一步放电。 在这种情况下,建议将电阻器 R6 的值增加到 10 kOhm。 因此,器件在工作模式下消耗的电流将从 12 mA 降至 2,5 mA。 应该记住,在保护操作的边缘,该电流增加到大约 60 mA,但随着脉冲发生器的启动,电池放电电流的平均值下降到 4 ... 6 mA。 根据所考虑的脉冲保护原理,不仅可以构建稳压器,还可以构建安装在电源和负载之间的自愈电子“保险丝”。 与熔断体不同,这种熔断器可以重复使用,无需担心在消除操作原因后会恢复。 电子熔断器必须能够承受短期和长期、完全或部分负载闭合。 后者通常发生在长连接线的情况下,其电阻是有效负载的重要组成部分。 这种情况对于熔断器的开关元件来说是最困难的。 上图。 图7示出了具有脉冲保护的简单自愈电子保险丝的示意图。 其工作原理与上述稳压器接近(见图4),但在保护启动之前,晶体管VT1和VT2处于饱和状态,输出电压几乎等于输入。
如果负载电流超过允许值,晶体管VT1脱离饱和,输出电压开始下降。 它的增量通过电容器 C1 进入晶体管 VT2 的基极,关闭后者,并随之关闭 VT1。 输出电压进一步下降,并且由于雪崩过程,晶体管VT1和VT2完全关闭。 一段时间后,根据 R1C1 电路的时间常数,它们将再次打开,但是,如果过载持续存在,它们将再次关闭。 重复此循环,直到消除过载为止。 当负载略高于允许负载时,生成脉冲的频率约为 20 Hz,而当负载完全关闭时,生成脉冲的频率约为 200 Hz。 后一种情况下的脉冲占空比大于100。当负载电阻增大到可接受的值时,晶体管VT1将进入饱和状态,并且停止产生脉冲。 “熔断器”的工作电流可由下式近似确定
系数0,25是根据实验选择的,考虑到晶体管VT1从饱和状态转变到工作状态的瞬间,其电流传输系数远小于标称值。 输入电压12V时测得保护动作电流为0,35A,闭合时负载电流脉冲幅度为1,3A。未检测到迟滞(保护动作电流与恢复动作模式的电流之差)。 如有必要,可在“熔断器”输出端连接总容量不超过200微法的隔直电容器,这会将跳闸电流增加至大约0,5A。 如果需要限制晶体管VT2发射极电路中负载电流脉冲的幅值,则应加入几十欧姆的电阻,并略增大电阻R3的阻值。 如果负载没有完全闭合,晶体管VT2的基极-发射极部分可能被电击穿。 这对发电机的运行影响不大,并且不会对晶体管造成危险,因为击穿之前电容器C1中积累的电荷相对较小。 根据所考虑的方案(图7)组装的“熔断器”的缺点是由于负载电路中串联的电阻器R3和与负载无关的晶体管VT1的基极电流而导致效率低。 后者对于其他类似设备来说是典型的[8]。 这两个降低效率的原因都在最大负载电流为 5 A 的更强大的“保险丝”中得到了消除,其电路如图 8 所示。 90、在十倍以上的负载电流变化情况下,其效率超过0,5%。 无负载时消耗的电流小于XNUMXmA。
为了减少“保险丝”两端的压降,VT4采用了锗晶体管。 当负载电流小于允许值时,该晶体管处于饱和边缘。 该状态由负反馈环路支持,当晶体管 VT2 开路并饱和时,负反馈环路由晶体管 VT1 和 VT3 形成。 晶体管VT4集电极-发射极部分的压降在负载电流0,5A时不超过1V,在0,6A时不超过5V。 当负载电流小于保护跳闸电流时,VT3晶体管处于工作模式,其集电极和发射极之间的电压足以打开VT6晶体管,从而保证VT2晶体管的饱和状态,并最终保证VT4按键的导通状态。 随着负载电流的增大,VT3的基极电流在负OS的影响下增大,其集电极电压下降,直至晶体管VT6截止。 就在这时,保护启动了。 跳闸电流可以通过以下公式估算
其中 Req 是并联的电阻器 R4、R6 和 R8 的总电阻。 与之前的情况一样,系数 0,5 是实验性的。 当负载闭合时,输出电流脉冲的幅度约为保护动作电流的两倍。 由于正OS的作用,通过电容器C2闭合,晶体管VT6以及VT2-VT4完全闭合,VT5打开。 晶体管保持在指示的状态,直到电流流过晶体管VT2的基极-发射极部分和电阻器R5、R7、R9、R11完成对电容器C12的充电。 由于 R12 具有所列电阻器中的最大值,因此它决定了生成脉冲的重复周期 - 大约 2,5 秒。 电容C2充电完成后,三极管VT5截止,VT6、VT2-VT4截止。 电容器C2在大约0,06秒内通过晶体管VT6、二极管VD1和电阻器R11放电。 在负载闭合的情况下,此时晶体管VT4的集电极电流达到8…10A。然后重复该循环。 然而,在过载消除后的第一个脉冲期间,晶体管VT3不会进入饱和状态,“熔丝”将返回工作模式。 有趣的是,在脉冲期间,晶体管VT6并没有完全打开。 这是通过晶体管 VT2、VT3、VT6 形成的负 OS 环路来防止的。 根据图中所示的电阻器 R8(9 kOhm)的值(图 51),晶体管 VT6 集电极上的电压不会降至 0,3 Uin 以下。 对“保险丝”最不利的负载是大功率白炽灯,其中冷灯丝的电阻比热灯丝的电阻小几倍。 用12V 32+6W车灯进行测试表明,0,06s的预热时间就足够了,打开后“保险丝”可靠地进入工作模式。 但对于惯性较大的灯,可能必须通过安装更大的电容器 C2(但不是氧化物)来增加脉冲的持续时间和重复周期。 由于这种替换而生成的脉冲的占空比将保持相同。 等于40,这并不是偶然选择的。 在这种情况下,在最大负载电流 (5 A) 和“保险丝”输出闭合时,VT4 晶体管上消耗的功率大致相同且安全。 GT806A 晶体管可以替换为同系列的另一个晶体管或强大的锗晶体管,例如具有任何字母索引的 P210。 如果没有锗晶体管或者需要在高温下工作,也可以使用h21e>40的硅晶体管,例如任意字母索引的KT818或KT8101,将电阻R5的值增加到10 kOhm。 如此更换后,在负载电流为4A时,测得VT0,8三极管集电极和发射极之间的电压不超过5V。 制作“保险丝”时,VT4晶体管必须安装在散热器上,例如尺寸为80x50x5毫米的铝板。 VT1,5晶体管还需要面积为2 ... 2 cm3的散热器。 首次空载开机,首先检查VT4三极管集电极和发射极之间的电压,应约为0,5V。然后通过电流表在输出端连接一个阻值为10…20欧姆、功率为100W的线制可变电阻。 逐渐降低其电阻,使设备进入保护模式。 使用示波器,确保模式切换发生时没有长时间的瞬变,并且生成的脉冲的参数与上面指示的参数相对应。 保护工作电流的精确值可以通过选择电阻器R4、R6、R8来设置(最好它们的额定值保持相同)。 对于长时间的负载电路,晶体管VT4的外壳温度不应超过其允许值。 文学
作者:A. Moskvin,叶卡捷琳堡
控制和操纵光信号的新方法
05.05.2024 Primium Seneca 键盘
05.05.2024 世界最高天文台落成
04.05.2024
▪ 超小型手机天线 ▪ 海洋软机器人 ▪ Xerox Phaser 4NI 和 Phaser 3052DNI A3260 网络打印机
▪ 文章 KIA6210 芯片上的低频放大器。 无线电电子电气工程百科全书 文章评论: 根纳季· 非常感谢这篇文章和对这个人的关注!
www.diagram.com.ua |













 留下您对本文的评论:
留下您对本文的评论: