|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
无线电电子与电气工程百科全书 带激光笔的半自动钻孔机。 无线电电子电气工程百科全书
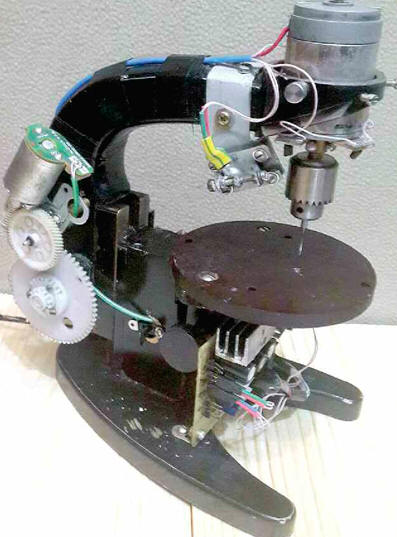
为了在印刷电路板上钻孔,许多无线电业余爱好者使用所谓的微型钻头,这是一种微型直流电动机,轴上装有钻夹头夹。 作为加工印刷电路板的工具,微钻头远非理想:在不打孔的情况下,很难精确地进入未来孔的中心,并且几乎不可能用手实现微钻头的精确垂直位置。 其结果是产生质量差的“斜”孔,其中心移位到板的另一侧,甚至损坏钻头(特别容易损坏昂贵的硬质合金钻头,它是由非常脆弱的材料制成的)材料)。 市场上的钻床有很多选择,但它们都具有手动钻进给和显着的间隙,并且它们包含的电子“支持”仅是驱动电机的电源和速度稳定器。 文章中描述的自制钻孔机可以让您无需预先打芯即可钻孔。 其操作逻辑由微控制器控制。 在这台机器上工作时,昂贵的硬质合金钻头不会断裂。 由于使用这种钻头,孔的质量得到了提高 - 它们实际上是切割孔,因此钻孔后无需打磨箔片,这使得印刷导体的薄箔变得更薄。 我已经用一把硬质合金钻头(德国制造)在这台机器上钻了 1500 多个孔,它仍然没有破裂,并且继续钻出高质量的孔。 便宜的钻头通常在涂有箔的玻璃纤维上钻10-20个孔后就停止钻孔,因此必须提高钻头的速度并增加钻孔时的压力,结果会在孔周围形成箔卷,钻孔后,需要用砂纸对导体进行彻底处理。 该机(其左、右、背面外观分别如图1-3所示)是在LOMO协会生产的国产显微镜MBI-3的基础上制成的。 其工作由控制单元(CU)控制,其框图如图4所示。 45.它基于ATtiny1微控制器[XNUMX]。 当通电时,控制单元将机器设置到其原始位置,即,如果其可移动部分处于下部或中间位置,则它会自动上升到初始上部位置。 接下来,将待加工的板放在激光束下(确保激光束击中孔的中心),用手将其压在工作台上,然后踩下踏板。 同时,控制单元向钻夹头驱动电机和钻头进给电机供电。 钻孔结束时,钻头进给电机将机器返回到原始状态,并且控制单元关闭两个电机的电源。 机器已准备好钻下一个孔。
作为激光笔,采用了改进的激光模块,用于儿童玩具中。 必须将激光准直器聚焦在短距离内并限制电源电流,以使激光刚刚开始发光。 这样可以实现更细的光束(我能够实现 0,2 毫米的光束直径)并将激光辐射降低到安全水平。 激光器安装组件如图5所示。 6、其零件图见图3。 4.底座1和激光支架4由大约3毫米厚的钢板制成(我使用了旧CD-ROM盒的壁)。 在工件上钻出必要的孔后,将支架 4 处的矩形花瓣弯曲成直角,以便将螺钉与激光模块连接。 模块拆解,其黄铜本体和两个M5螺母的焊接区域镀锡。 将螺丝 3 (M28x8) 插入支架 5 的弯曲花瓣的孔中,然后将两个螺母 2 拧到螺丝上,使它们位于支架的孔眼之间(见图 5)。 激光器主体 8 插入螺钉 XNUMX 下方(螺母 XNUMX 之间),并将螺母焊接到其上,使其与支架紧密贴合(这对于调节过程中螺钉旋转时激光器的无间隙移动是必要的) 。
接下来,将另外两个螺母5拧到螺钉1的突出端上(其中一个为锁紧螺母)并拧紧,使得保持器4的凸耳阻止螺钉5沿轴线移动。 现在,当顺时针和反方向旋转螺丝时,激光模块将从一个凸耳移动到另一个凸耳。 为了将带有激光的支架固定在底座 3 上,需要将四个螺母焊接到底座 2 的背面(它们在图 7 中清晰可见)。 然后,将四颗螺丝 3 (M15x6) 和垫圈 XNUMX 置于头下方,从激光侧插入支架相应的孔中,并在其上放置圆柱形压缩弹簧,然后将其拧入焊接到底座上的螺母中。 现在,借助螺钉,您可以在不同方向上调整激光器的位置。 在管支架(显微镜的上部)上尝试组装好的结构,将激光支架底座的柄绕其弯曲,并使用锋利的划线器将底座上孔的轮廓转移到管上支架上钻两个直径为 2,5、深度为 10 mm 的孔,并切出 M3 螺纹。 最后,用 M3 螺钉将激光支架底座固定到显微镜上。 为了给钻头进给,使用了来自录像机的带有蜗轮的电动机(我拆解了该设备很长时间,所以我无法指出它的名称)。 该机构(图 7)使用三个带有 M4 内螺纹和外螺纹以及相同数量的 M4 螺钉的金属柱连接到显微镜的镜筒支架上。 齿轮用三颗带螺母的M2,5螺钉固定在显微镜手柄上,两部分的孔都是通孔。 组装过程中必须小心 - 齿轮和手柄的错位应最小化。
进给速度由调谐电阻R11调节。 使用的电动机是低功率的(额定电压 - 6 V,电流 - 30 mA),但由于蜗轮,它可以很好地完成其任务。 齿轮箱的设计可以是任意的,但必须提供足够的力以轻松转动显微镜的手柄。 您可以使用步进电机。 在第一个项目中,我就是这么做的,但是现有的步进电机轴上的扭矩不足,我找不到合适的电机。 如果有人对使用步进电机感兴趣,可以通过小编联系我。 项目文件已保存。 它使用 ATmega8 微控制器。 复合晶体管VT5VT6上的按键控制钻头进给电机(接XP6插头),VT2晶体管和K1继电器控制其方向:向上或向下。 VT3VT4复合晶体管上的按键控制钻机驱动电机(接XP3插头),DA1微电路和VT1晶体管上组装有稳频器,通过调谐电阻R1调节频率。 使用更复杂的速度稳定器是没有意义的,例如,如[2]中提出的,因为没有必要用钻头“用眼睛”“瞄准”孔的中心。 对于这个问题已经进行了实验。 在 DA6 芯片上,组装了一个为钻头进给电机供电的电压调节器 [3]。 串联的积分稳压器DA2和DA5分别设计用于获得12V和5V的稳定电压。 电容器C3、C4、C2起滤波作用,其余起隔直作用。 该机器采用 LED 照明。 背光电流和激光电流稳定:DA3芯片上组装有激光电流稳定器,DA4芯片上装有背光LED。 稳定电流通过公式 I = 1,25 / R [3] 计算,并通过选择电阻器 R13 和 R14 进行设置。 由于电流稳定,可以串联多个相同类型的背光LED。 激光器连接到 XP4 插头,LED 连接到 XP5。 XP7 连接器用于连接编程器。 其触点的用途对应于“TRITON+ V5.7T USB”编程器[4]。 微控制器程序是在集成环境Code VisionAVR V2.05中开发的[5, 6]。 XP2 连接器上连接有用于钻头最高位置和最低位置的两位传感器和钻孔启动按钮。 后者连接到触点 2 和 4,上部位置传感器连接到触点 1 和 4,下部位置传感器连接到触点 3 和 4。传感器和按钮具有常开触点,触发时连接到公共端。金属丝。 安装在踏板上的限位开关用作按钮。 位置传感器用于音乐中心的 DVD 播放器。 调整下部位置传感器的操作,使钻头落入加工板下方不超过 1 毫米。 上部位置传感器调节钻头的最大行程;超过 20 毫米是没有意义的。 调整是通过移动由弹性线 3 制成的支架(图 8)来进行的,该支架用螺钉 6 (M3) 固定在支架 5 上。螺钉通过支架上的槽拧入带有螺纹的矩形板中,这样您就可以上下移动挡块。 使用螺纹板而不是标准螺母,以便能够将柱子的位置固定在找到的位置,而无需使用任何工具来防止螺母在拧紧螺钉时旋转 6. 您可以将板焊接到螺母上。 支架用螺丝 4 固定在管架上,L 形支架上的传感器 2 用螺丝固定在显微镜底座上。 支架5的图纸如图9所示。 XNUMX、它与激光支架部件一样,都是由钢板制成的。
机器的供电电压取决于所使用的钻头驱动电机,但不应低于14V。我使用的是佳能喷墨打印机的打印头移动电机,标称供电电压为24V。机器的供电电压选择机器的调整裕度为 30 V。电流消耗为稳定状态(钻孔期间)的总设备 - 1,5 A,在启动发动机时,电流消耗会短暂增加到 3 A。 因此,电源必须提供 30 V 的输出电压,电流消耗至少为 3 A。我使用自制的开关实验室电源,带有线性稳定器 0 ... 50 V、0 ... 10A。 电流限制使电机能够平稳启动。 控制单元的细节安装在由单面箔玻璃纤维制成的印刷电路板上,根据图 10 所示的图纸制作。 XNUMX.通过将来自底片的图像曝光到涂有光致抗蚀剂的工件箔上来施加印刷导体图案。 负性光掩模可以使用喷墨打印机以最高质量打印。
固定电阻器 R3、R7-R9、R15、陶瓷电容器 C1、C4、C5、C7(所有尺寸为 0805,用于表面安装)和微控制器 DD1(采用 SOIC8 封装)直接焊接到印刷导体上。 其余电阻为MLT-0,25,电容为进口氧化物。 晶体管 VT1、VT4、VT6 - 任何系列 KT805、KT819、VT3、VT5 - BC337、BC547、2N2222、KT315、KT3102 系列; VT2-ВС337、2N2222、KT630、KT815、KT972系列中的任何一个(其集电极电流最大值不得小于继电器K1的工作电流)。 一只KT5或KT6系列晶体管可用作VT829VT972按键,一只任意字母索引的KT3或KT4晶体管可用作VT827VT829按键。 继电器 K1 - R40-11D2-5/6,可以用响应电压为 5 V 且具有两组额定开关电流至少为 1 A 的开关触点的任何其他继电器代替。您可以通过以下方式使用 12 V 继电器:将上部(根据图表)输出绕组(与二极管 VD1 一起)连接到 DA3 芯片的输出(引脚 2)。 控制板安装在载物台下方,并用 M3 螺钉穿过角落固定到显微镜底座(见图 1)。 芯片DA2和DA5安装在散热器上。 建议晶体管VT1加散热片。 桌子由 Textolite 制成。 在转换为钻孔机之前,必须拆卸显微镜,用阻碍管架(显微镜上部)移动的相当粘稠的润滑剂彻底清洗,并用液体润滑剂(例如变压器油)润滑。 上部的移动应尽可能轻松、平稳、无间隙。 我们决定放弃使用经典的夹头来紧固钻头。 直径0,3-4,5毫米的钻头采用莫氏锥度和三爪卡盘。 电机与墨盒之间的连接必须顺畅。 借助螺钉对加工板上的激光点进行调整,按照以下顺序进行:在与制造板相似的箔玻璃纤维板上钻一个孔,然后精确调整激光点用支架的调节螺钉将其固定到孔中。 在这种情况下,必须尽量不要移动板材。 根据我的经验,如果激光点消失(停止从箔片反射),则激光束已进入孔并对齐。 玻璃纤维的厚度应与制造的板的厚度相同。 之后,您可以确定激光将准确地指示未来孔的中心。 凭借可维修部件和无错误安装,无需调整控制单元。 该机器已运行一年多了。 操作时解放双手,方便在机器上作业。 尽管我经常制作木板,但我没有损坏过一个钻头,而且我不知道以前没有这台机器时我是如何度过的。 现在我大胆购买优质昂贵的钻头。 钻50个孔需要不超过半小时。 但仍然需要小心,将板安装在机器的工作台上时,存在损坏易碎钻头的危险 - 无意中撞到钻头。 钻孔时钻头断裂的概率很小,当然除非你此时移动木板。 可以下载微控制器程序以及 .pdf 格式的负片和正片光掩模,用于将印刷导体图案转移到印刷电路板毛坯上 来自 ftp://ftp.radio.ru/pub/2015/07/stanok.zip. 文学
作者:I. Parshin
用于触摸仿真的人造革
15.04.2024 Petgugu全球猫砂
15.04.2024 体贴男人的魅力
14.04.2024
▪ 太阳能电池板三明治,用于将能量从太空直接传输到地面接收器 ▪ 发现水小行星
▪ 文章 电源稳压器 LPS-2500RV 的改进。 无线电电子电气工程百科全书
www.diagram.com.ua |










 留下您对本文的评论:
留下您对本文的评论: